Installation
Navigation2 and Nav2 bringup are packages that are important for the actual path planning and autonomous navigation for the actual robot. Turtlebot3 is a way to path planning given a static map and simulated odometry. This is a good way to test the actual navigation parameters in “perfectly simulated” conditions.
sudo apt install ros-foxy-navigation2
sudo apt install ros-foxy-nav2-bringup
sudo apt install ros-foxy-turtlebot3*
To ensure nav2 is functional, try running the following demo simulation :
export TURTLEBOT3_MODEL=waffle
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/foxy/share/turtlebot3_gazebo/models
ros2 launch nav2_bringup tb3_simulation_launch.py
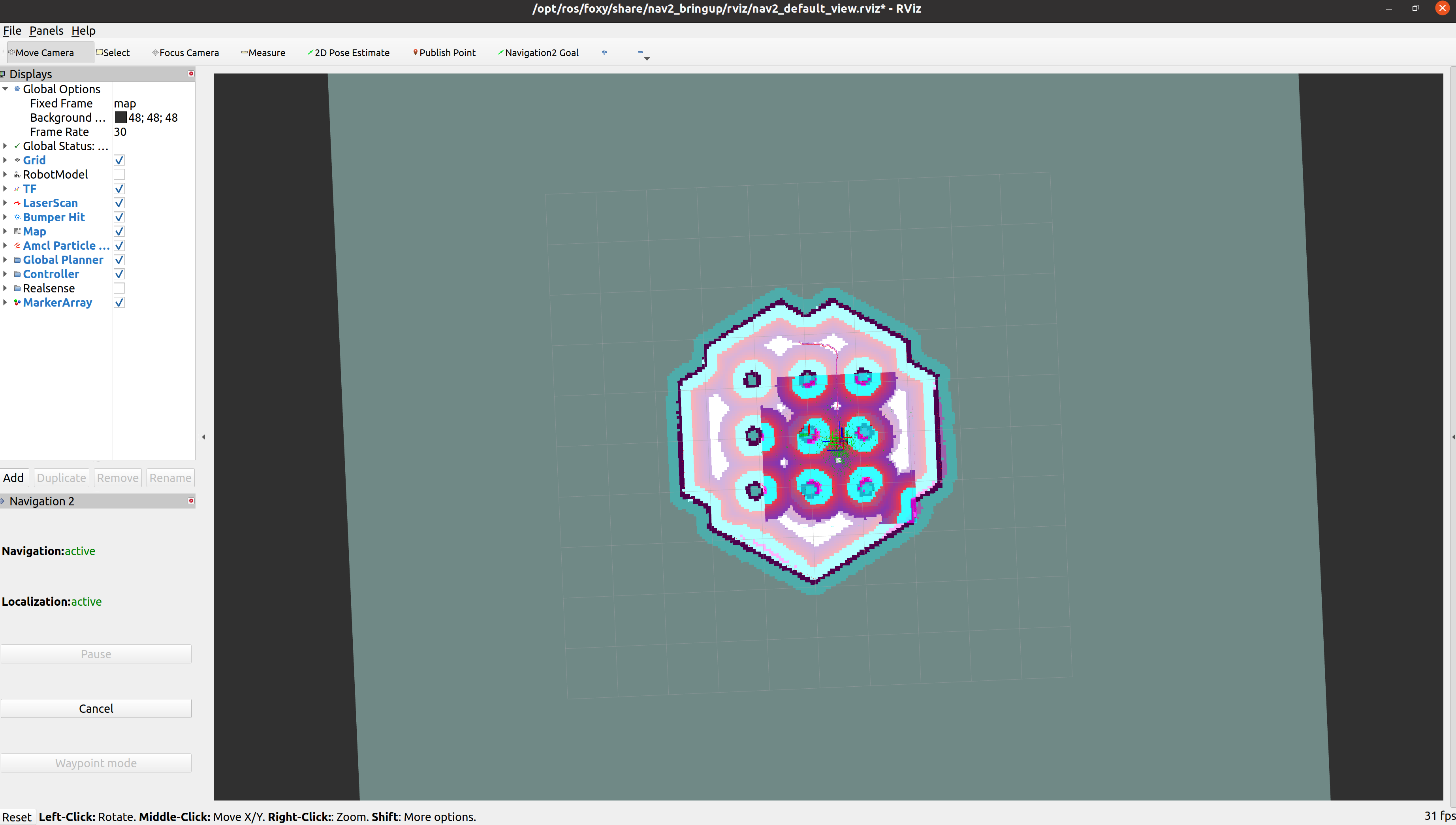
When the Rviz2 display appears, place a 2D Pose Estimate on the map representing the starting location of the simulated robot. Then, place a Navigation2 Goal representing the simulated goal. You should then see the simulated robot frame move towards the goal.